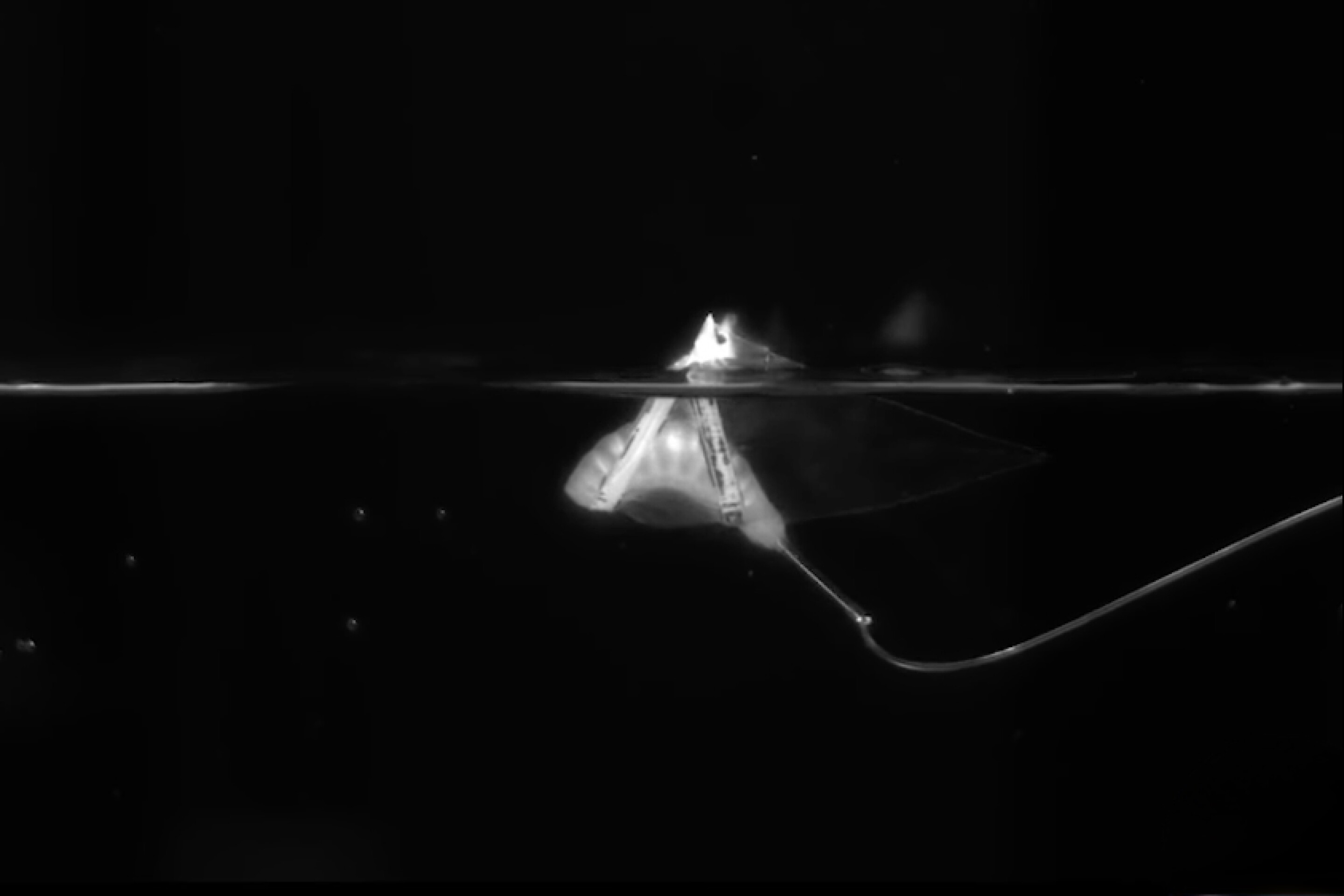
速度极快的新型鳐鱼机器人在水面游动的侧影 北卡罗来纳州立大学
它有两个类似鳐鱼的柔性聚酯翅膀,实际上是一个弯曲的双稳态结构的左右两端。 双稳态指的是一种张力结构能够在不需要任何能量的情况下保持在两个位置中的任何一个--发夹就是双稳态结构的一个很好的例子。
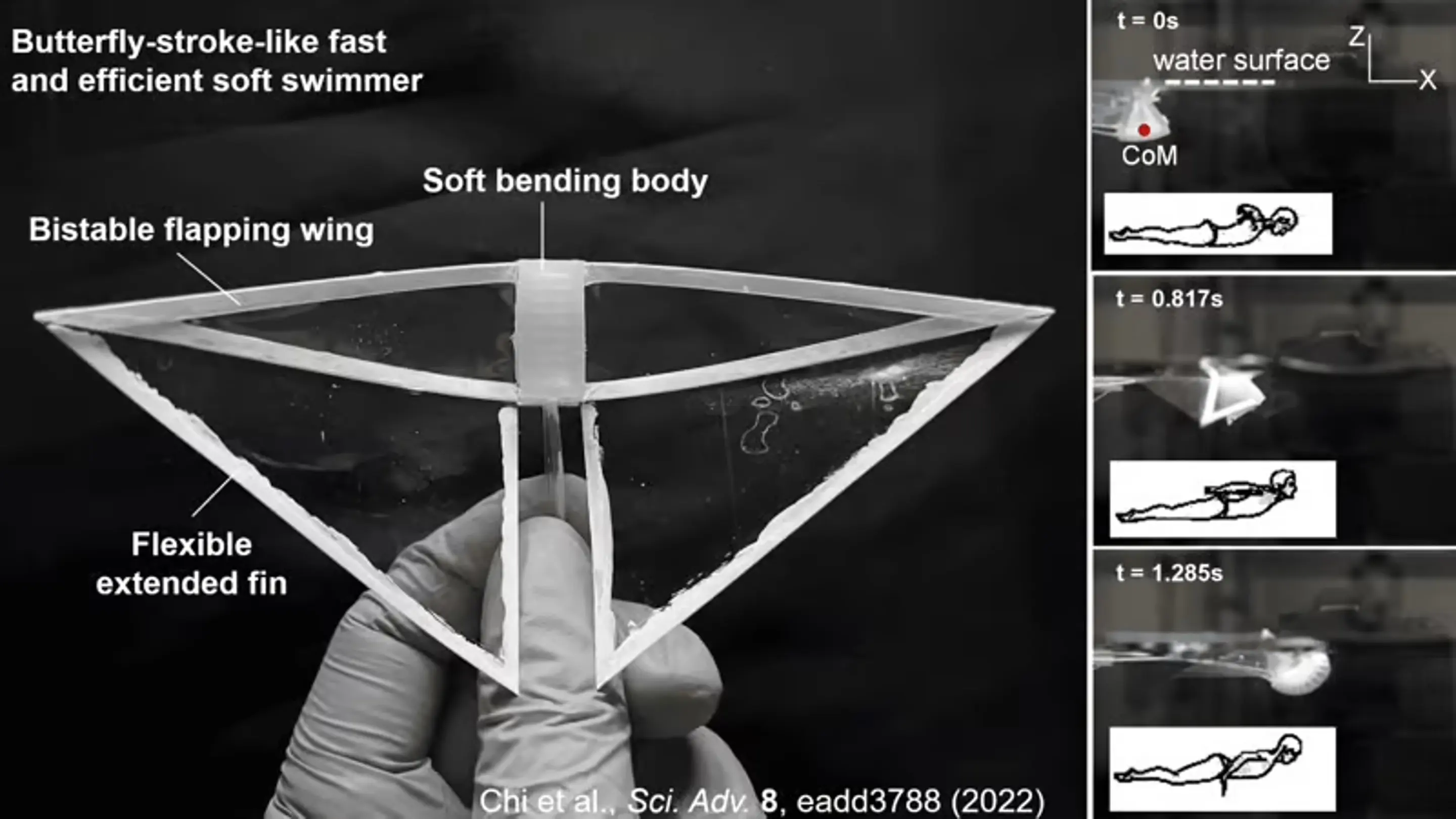
模仿蝠鲼和人类蝶泳动作的原始机器人
机器鱼双稳态机翼结构的中部夹在上下两个软硅胶气动致动器之间。当向顶部致动器注入空气时,致动器会向上弯曲,拉起机翼结构的中部,使其"折叠"到一个位置,从而将两个机翼向下拉。 当顶部的致动器被放气,底部的致动器被充气时,结构会向相反的方向折断,使机翼再次向上。 下面的视频演示了这一机制。
通过这种方式(通过外部气泵)来回启动两个致动器,可以快速扇动翅膀,使平均游泳速度达到每秒 3.74 个身长。 据科学家称,这比以前的软体游泳机器人快了大约四倍。
在 68 毫米长的新型机器人曼塔中,殷和他的团队取消了双稳态设计和底部致动器。 现在,灵活的翅膀结构是单稳态的,这意味着当没有能量施加时,它将始终恢复到一个位置--中间弯曲向下,翅膀向上。
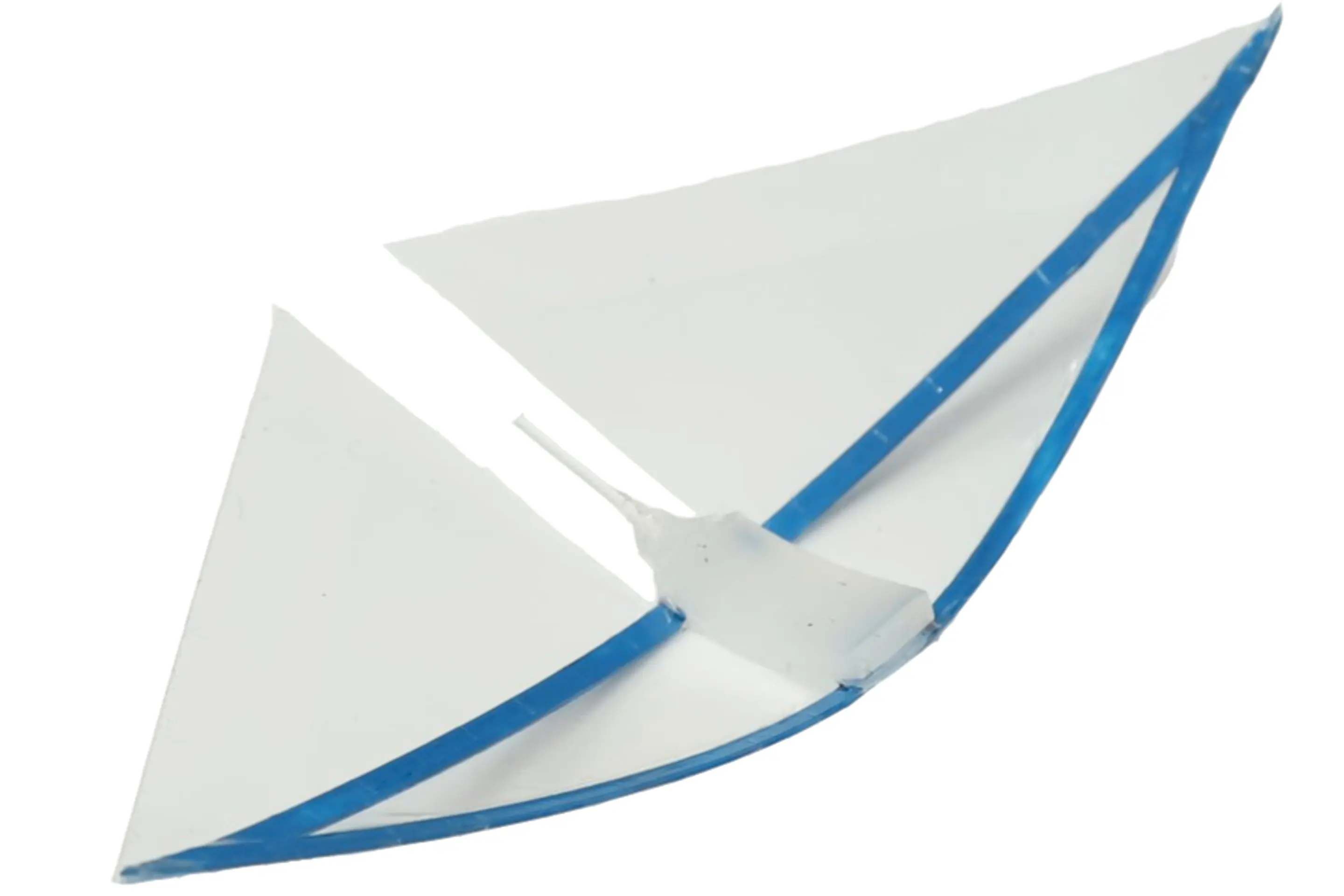
新型单稳态鳐鱼机器人,图中为其默认位置
充气时,单顶气动致动器向下卷曲并向下拉动机翼结构的中部,使机翼向下折叠。 然而,一旦让推杆放气,结构的弹性恢复力就会使其恢复到默认位置,并在此过程中将机翼向上拉起。
因此,原来的机器人在每个上下拍打翅膀的周期中,需要花费时间和能量交替充气/放气两个致动器,而新机器人只需激活一个。 这一改进使机器人的平均游泳速度高达每秒 6.8 个身长,而消耗的能量却比原来的机器人少 1.6 倍。
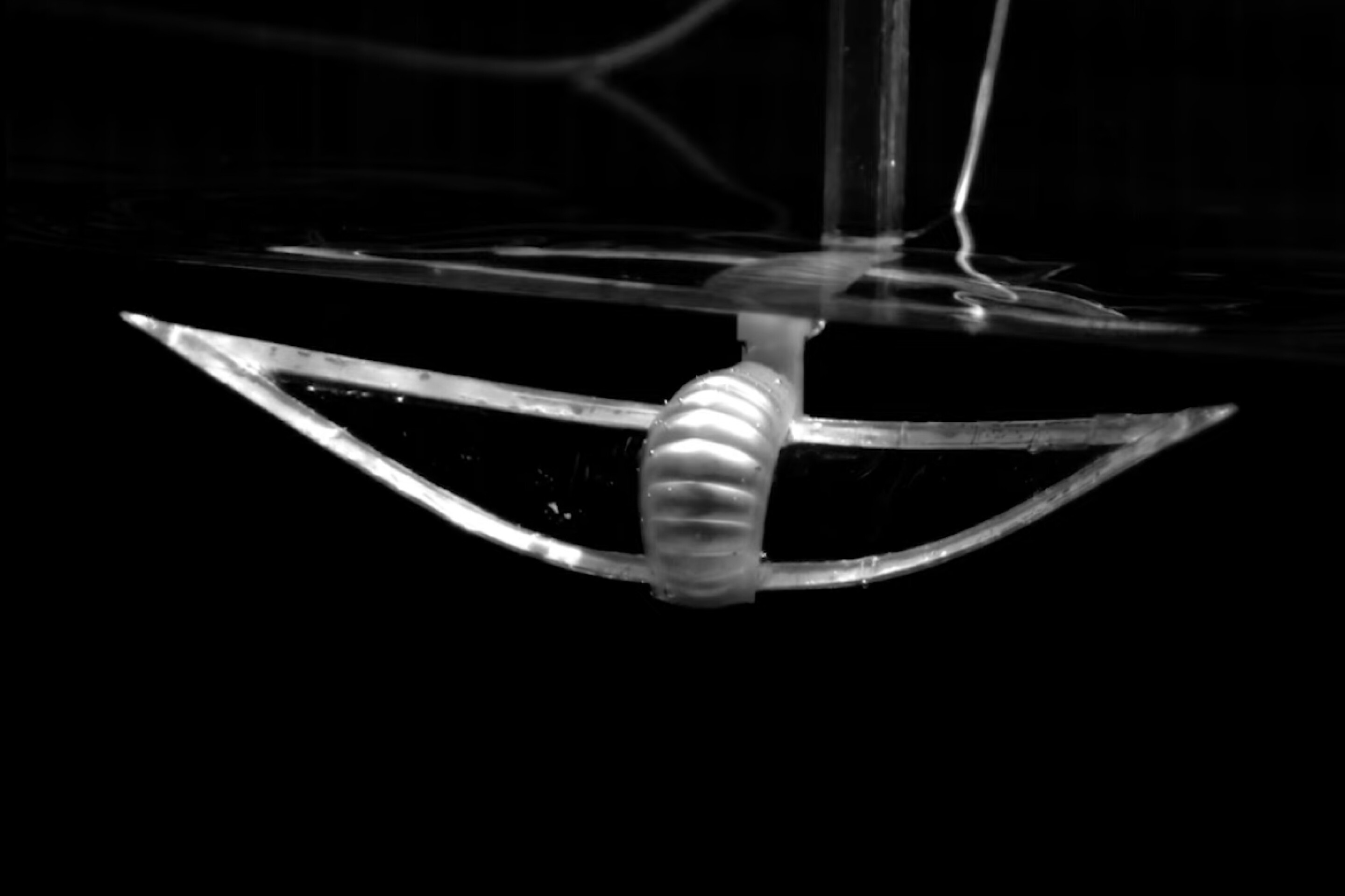
受蝠鲼启发的新型软体机器人正视图
此外,新设计还允许机器人通过改变游泳速度在水体中垂直移动。
"当机器人的鳍处于静止状态时,气室是空的,会减少机器人的浮力。 而当机器人缓慢扇动鳍时,鳍处于静止状态的时间更长,"该研究的第一作者、博士生覃海涛(音译)说。"换句话说,机器人拍打鳍的速度越快,气室充满的时间就越长,浮力就越大。"

科学家们现在正在研究一种横向操纵机器人的方法,着眼于未来的应用,如海洋探索和水生野生动物观察。 您可以在下面的视频中看到它的动作。
有关这项研究的论文最近发表在Science Advances杂志上。